EASY DIY – RFID Door Lock
Today we’re going to build an RFID Door Lock based using Raspberry Pi Pico. Also we’ll be storing all the RFID Card’s code locally on a SD card for easy

Today we're going to build an RFID Door Lock based using Raspberry Pi Pico. Also we'll be storing all the RFID Card's code locally on a SD card for easy modification to the list.
Why use RFID for Door lock? It's simple, because with each RFID card, comes Unique Identification number's which we can set in the controller to have different actions. Like setting up access levels to different people's which most MNC's do on their premises for added security.
Also using RFID is fast and secure too, user just need to tap their card and door lock will unlock for them for few seconds which it enough for them to open the gate and pass through.
So, lets get started then,
How RFID works ?
At first RFID reader module transmits radio waves. The tag consists of a small coil in it. And when the tag is held closer to the reader module the radio wave transmitted by the reader induces current in the tags coil. This induced electro motive force powers the chip inside the tag. Once the chip gets powered up, it also transmits the RFID code using frequency modulation. This modulated signal is decoded by the reader and send to microcontroller using standard communication protocols like SPI, UART or I2C.
The reader module we are using is RC522. The RC522 supports I2C, UART and SPI protocol we are using SPI protocol in this project.
Radio Waves -
Radio waves are a type of electromagnetic radiation. A radio wave has a much longer wavelength than visible light. Humans use radio waves extensively for communications. A radio tower or transmitter can have both rectangular and circular antennas to transmit and receive radio frequency energy.
RC522 -
RC522 is the highly integrated RFID card reader which works on non-contact 13.56mhz communication, is designed by NXP as low power consumption, low cost and compact size read and write chip, is the best choice in the development of smart meters and portable hand-held devices.
Active and Passive RFID Systems -
There are two types of RFID systems. One is active and another is passive. In this project we are using a passive RFID system. In active RFID system, the tag is battery powered and also the frequency is high this increases the range of tag detection to several meters. In passive RFID system the tag doesn’t contain a battery and the range of tag detection is 5 to 10cm which is perfect for our application.
What is Raspberry Pi Pico ? And why ?
The Raspberry Pi Pico series is a range of tiny, fast, and versatile development boards built on RP2040, and the microcontroller chip designed by Raspberry Pi in UK.
Some of the key features of Raspberry Pi Pico -
- Dual Core ARM Cortex-M0+ processor
- 264kB RAM
- 2 × UART, 2 × SPI controllers, 2 × I2C controllers, 16 × PWM channels
- Supported input voltage 1.8–5.5V DC
- Accurate on-chip clock
- Temperature sensor
We choose Raspberry Pi Pico, because it offer's many features like 2 of I2C, SPI, UART controllers. Which is necessary for any future upgrades like adding more RFID Reader's or other peripherals to the controller.
Hardware Requirements of this Project -
- Raspberry Pi Pico
- RC522 RFID reader module
- RFID tags – 2 tags are included with the Module
- 1602 LCD Module with I2C module
- Solenoid door lock - 24V DC
- SD Card Module and SD card
- Relay Module
- Prototype Board
- 24V Power Supply
- Terminal
- Headers
- Jumper Cables
Software Requirements of this Project -
- Thonny IDE
- LCD libraries for Pi Pico.
- SD Card libraries for Pi Pico
Prerequisites and setting up -
Download latest Thonny IDE for your system and install it. Similarly download or get Arduino IDE from their website/windows store.
After installing both Thonny and Arduino IDE, open them up
Libraries / Firmware-
We gonna need the libraries for the LCD and the SD card module. So, open Thonny IDE and connect the Raspberry Pi Pico. Wait for some time for the computer to recognize the Pi Pico. After it recognizes, look at the bottom corner of the IDE for the python version, click on there and this window shall come up -
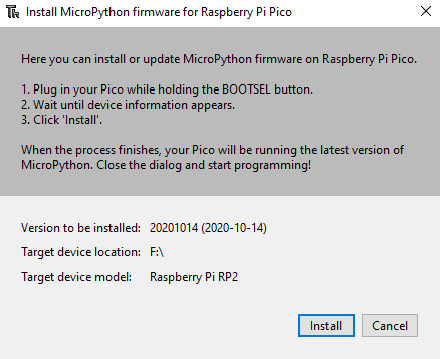
Press Install button, and wait it finishes updating the firmware and stuffs on the Raspberry Pi Pico.
Circuit Diagram and Hardware Interfacing -
Circuit Diagram -
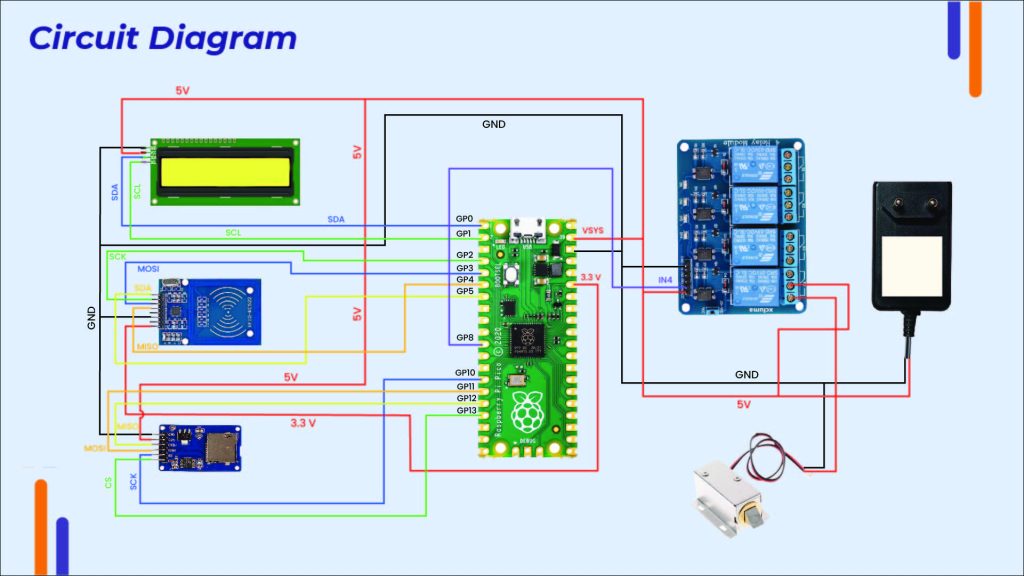
Hardware Interfacing -
Raspberry Pi Pico -
|
Raspberry Pi Pico |
RFID MODULE |
|
+3.3V |
+3.3V |
|
GND |
GND |
|
GP3 |
SCK |
|
GP4 |
MOSI |
|
GP5 |
MISO |
|
GP2 |
SDA |
|
Raspberry Pi Pico |
SD CARD MODULE |
|
VCC |
VCC |
|
GND |
GND |
|
GP10 |
SCK |
|
GP11 |
MOSI |
|
GP12 |
MISO |
|
GP13 |
CS |
|
Raspberry Pi Pico |
LCD Display |
|
VCC |
VCC |
|
GND |
GND |
|
GP0 |
SDA |
|
GP1 |
SCL |
|
Raspberry Pi Pico |
Relay Module |
|
VCC |
VCC |
|
GND |
GND |
|
GP8 |
IN4 |
Coding -
Copy the following codes and save it onto Pi Pico. Before you upload the code, make sure that correct firmware is installed on Pi Pico. It should be already there with newer Pico's, but in case it didn't have the latest firmware, then you'll need to update it.
Make an text file in the sdcard named employee.txt and within it, save data in this format -
replace the parts within [ ] with the actual data.
[name] CARD_ID:[card id]Also save the following files with the names as mentioned, else error will happen -
main.py -
from machine import Pin,I2C
from mfrc522 import MFRC522
from pico_i2c_lcd import I2cLcd
from utime import sleep_ms
import sdcard
import uos
reader = MFRC522(spi_id=0, sck=2, miso=4, mosi=3, cs=5, rst=15)
i2c=I2C(0,sda=Pin(0),scl=Pin(1),freq=100000)
lcd=I2cLcd(i2c,0x27,2,16)
lcd.clear()
cs = machine.Pin(13, machine.Pin.OUT)
spi = machine.SPI(1,baudrate=1000000,polarity=0,phase=0,bits=8,firstbit=machine.SPI.MSB,sck=machine.Pin(10),mosi=machine.Pin(11),miso=machine.Pin(12))
sd=sdcard.SDCard(spi,cs)
vfs = uos.VfsFat(sd)
uos.mount(vfs, "/sd")
red = Pin(6, Pin.OUT)
green = Pin(7, Pin.OUT)
lock = Pin(8, Pin.OUT)
red.value(1)
lock.value(0)
lcd.clear()
lcd.move_to(1,0)
lcd.putstr("Bring Your Tag")
lcd.move_to(5,1)
lcd.putstr("Closer")
def match(num):
with open("/sd/employee.txt", "r") as file:
for x in file:
if str(num) in x:
return x.split()
return False
def default_lcd():
lcd.clear()
lcd.move_to(1,0)
lcd.putstr("Bring Your Tag")
lcd.move_to(5,1)
lcd.putstr("Closer")
def success_lcd(name):
lcd.clear()
lcd.move_to(0,0)
lcd.putstr("Welcome:")
lcd.move_to(0,1)
lcd.putstr(name)
def fail_lcd():
lcd.clear()
lcd.move_to(1,0)
lcd.putstr("Not Permitted")
while True:
reader.init()
(stat, tag_type) = reader.request(reader.REQIDL)
if stat == reader.OK:
(stat, uid) = reader.SelectTagSN()
if stat == reader.OK:
card = int.from_bytes(bytes(uid),"little",False)
#print("CARD ID: "+str(card))
res = match(card)
if res != False:
green.value(1)
red.value(0)
success_lcd(' '.join([res[0], res[1]]))
lock.value(1)
sleep_ms(2000)
if res == False:
fail_lcd()
sleep_ms(2000)
green.value(0)
red.value(1)
lock.value(0)
default_lcd()
sleep_ms(500)
mfrc522.py -
from machine import Pin, SPI
from os import uname
class MFRC522:
DEBUG = False
OK = 0
NOTAGERR = 1
ERR = 2
REQIDL = 0x26
REQALL = 0x52
AUTHENT1A = 0x60
AUTHENT1B = 0x61
PICC_ANTICOLL1 = 0x93
PICC_ANTICOLL2 = 0x95
PICC_ANTICOLL3 = 0x97
def __init__(self, sck, mosi, miso, rst, cs,baudrate=1000000,spi_id=0):
self.sck = Pin(sck, Pin.OUT)
self.mosi = Pin(mosi, Pin.OUT)
self.miso = Pin(miso)
self.rst = Pin(rst, Pin.OUT)
self.cs = Pin(cs, Pin.OUT)
self.rst.value(0)
self.cs.value(1)
board = uname()[0]
if board == 'WiPy' or board == 'LoPy' or board == 'FiPy':
self.spi = SPI(0)
self.spi.init(SPI.MASTER, baudrate=1000000, pins=(self.sck, self.mosi, self.miso))
elif (board == 'esp8266') or (board == 'esp32'):
self.spi = SPI(baudrate=100000, polarity=0, phase=0, sck=self.sck, mosi=self.mosi, miso=self.miso)
self.spi.init()
elif board == 'rp2':
self.spi = SPI(spi_id,baudrate=baudrate,sck=self.sck, mosi= self.mosi, miso= self.miso)
else:
raise RuntimeError("Unsupported platform")
self.rst.value(1)
self.init()
def _wreg(self, reg, val):
self.cs.value(0)
self.spi.write(b'%c' % int(0xff & ((reg << 1) & 0x7e)))
self.spi.write(b'%c' % int(0xff & val))
self.cs.value(1)
def _rreg(self, reg):
self.cs.value(0)
self.spi.write(b'%c' % int(0xff & (((reg << 1) & 0x7e) | 0x80)))
val = self.spi.read(1)
self.cs.value(1)
return val[0]
def _sflags(self, reg, mask):
self._wreg(reg, self._rreg(reg) | mask)
def _cflags(self, reg, mask):
self._wreg(reg, self._rreg(reg) & (~mask))
def _tocard(self, cmd, send):
recv = []
bits = irq_en = wait_irq = n = 0
stat = self.ERR
if cmd == 0x0E:
irq_en = 0x12
wait_irq = 0x10
elif cmd == 0x0C:
irq_en = 0x77
wait_irq = 0x30
self._wreg(0x02, irq_en | 0x80)
self._cflags(0x04, 0x80)
self._sflags(0x0A, 0x80)
self._wreg(0x01, 0x00)
for c in send:
self._wreg(0x09, c)
self._wreg(0x01, cmd)
if cmd == 0x0C:
self._sflags(0x0D, 0x80)
i = 2000
while True:
n = self._rreg(0x04)
i -= 1
if ~((i != 0) and ~(n & 0x01) and ~(n & wait_irq)):
break
self._cflags(0x0D, 0x80)
if i:
if (self._rreg(0x06) & 0x1B) == 0x00:
stat = self.OK
if n & irq_en & 0x01:
stat = self.NOTAGERR
elif cmd == 0x0C:
n = self._rreg(0x0A)
lbits = self._rreg(0x0C) & 0x07
if lbits != 0:
bits = (n - 1) * 8 + lbits
else:
bits = n * 8
if n == 0:
n = 1
elif n > 16:
n = 16
for _ in range(n):
recv.append(self._rreg(0x09))
else:
stat = self.ERR
return stat, recv, bits
def _crc(self, data):
self._cflags(0x05, 0x04)
self._sflags(0x0A, 0x80)
for c in data:
self._wreg(0x09, c)
self._wreg(0x01, 0x03)
i = 0xFF
while True:
n = self._rreg(0x05)
i -= 1
if not ((i != 0) and not (n & 0x04)):
break
return [self._rreg(0x22), self._rreg(0x21)]
def init(self):
self.reset()
self._wreg(0x2A, 0x8D)
self._wreg(0x2B, 0x3E)
self._wreg(0x2D, 30)
self._wreg(0x2C, 0)
self._wreg(0x15, 0x40)
self._wreg(0x11, 0x3D)
self.antenna_on()
def reset(self):
self._wreg(0x01, 0x0F)
def antenna_on(self, on=True):
if on and ~(self._rreg(0x14) & 0x03):
self._sflags(0x14, 0x03)
else:
self._cflags(0x14, 0x03)
def request(self, mode):
self._wreg(0x0D, 0x07)
(stat, recv, bits) = self._tocard(0x0C, [mode])
if (stat != self.OK) | (bits != 0x10):
stat = self.ERR
return stat, bits
def anticoll(self,anticolN):
ser_chk = 0
ser = [anticolN, 0x20]
self._wreg(0x0D, 0x00)
(stat, recv, bits) = self._tocard(0x0C, ser)
if stat == self.OK:
if len(recv) == 5:
for i in range(4):
ser_chk = ser_chk ^ recv[i]
if ser_chk != recv[4]:
stat = self.ERR
else:
stat = self.ERR
return stat, recv
def PcdSelect(self, serNum,anticolN):
backData = []
buf = []
buf.append(anticolN)
buf.append(0x70)
#i = 0
###xorsum=0;
for i in serNum:
buf.append(i)
#while i<5:
# buf.append(serNum[i])
# i = i + 1
pOut = self._crc(buf)
buf.append(pOut[0])
buf.append(pOut[1])
(status, backData, backLen) = self._tocard( 0x0C, buf)
if (status == self.OK) and (backLen == 0x18):
return 1
else:
return 0
def SelectTag(self, uid):
byte5 = 0
#(status,puid)= self.anticoll(self.PICC_ANTICOLL1)
#print("uid",uid,"puid",puid)
for i in uid:
byte5 = byte5 ^ i
puid = uid + [byte5]
if self.PcdSelect(puid,self.PICC_ANTICOLL1) == 0:
return (self.ERR,[])
return (self.OK , uid)
def tohexstring(self,v):
s="["
for i in v:
if i != v[0]:
s = s+ ", "
s=s+ "0x{:02X}".format(i)
s= s+ "]"
return s
def SelectTagSN(self):
valid_uid=[]
(status,uid)= self.anticoll(self.PICC_ANTICOLL1)
#print("Select Tag 1:",self.tohexstring(uid))
if status != self.OK:
return (self.ERR,[])
if self.DEBUG: print("anticol(1) {}".format(uid))
if self.PcdSelect(uid,self.PICC_ANTICOLL1) == 0:
return (self.ERR,[])
if self.DEBUG: print("pcdSelect(1) {}".format(uid))
#check if first byte is 0x88
if uid[0] == 0x88 :
#ok we have another type of card
valid_uid.extend(uid[1:4])
(status,uid)=self.anticoll(self.PICC_ANTICOLL2)
#print("Select Tag 2:",self.tohexstring(uid))
if status != self.OK:
return (self.ERR,[])
if self.DEBUG: print("Anticol(2) {}".format(uid))
rtn = self.PcdSelect(uid,self.PICC_ANTICOLL2)
if self.DEBUG: print("pcdSelect(2) return={} uid={}".format(rtn,uid))
if rtn == 0:
return (self.ERR,[])
if self.DEBUG: print("PcdSelect2() {}".format(uid))
#now check again if uid[0] is 0x88
if uid[0] == 0x88 :
valid_uid.extend(uid[1:4])
(status , uid) = self.anticoll(self.PICC_ANTICOLL3)
#print("Select Tag 3:",self.tohexstring(uid))
if status != self.OK:
return (self.ERR,[])
if self.DEBUG: print("Anticol(3) {}".format(uid))
if self.MFRC522_PcdSelect(uid,self.PICC_ANTICOLL3) == 0:
return (self.ERR,[])
if self.DEBUG: print("PcdSelect(3) {}".format(uid))
valid_uid.extend(uid[0:5])
# if we are here than the uid is ok
# let's remove the last BYTE whic is the XOR sum
return (self.OK , valid_uid[:len(valid_uid)-1])
#return (self.OK , valid_uid)
def auth(self, mode, addr, sect, ser):
return self._tocard(0x0E, [mode, addr] + sect + ser[:4])[0]
def authKeys(self,uid,addr,keyA=None, keyB=None):
status = self.ERR
if keyA is not None:
status = self.auth(self.AUTHENT1A, addr, keyA, uid)
elif keyB is not None:
status = self.auth(self.AUTHENT1B, addr, keyB, uid)
return status
def stop_crypto1(self):
self._cflags(0x08, 0x08)
def read(self, addr):
data = [0x30, addr]
data += self._crc(data)
(stat, recv, _) = self._tocard(0x0C, data)
return stat, recv
def write(self, addr, data):
buf = [0xA0, addr]
buf += self._crc(buf)
(stat, recv, bits) = self._tocard(0x0C, buf)
if not (stat == self.OK) or not (bits == 4) or not ((recv[0] & 0x0F) == 0x0A):
stat = self.ERR
else:
buf = []
for i in range(16):
buf.append(data[i])
buf += self._crc(buf)
(stat, recv, bits) = self._tocard(0x0C, buf)
if not (stat == self.OK) or not (bits == 4) or not ((recv[0] & 0x0F) == 0x0A):
stat = self.ERR
return stat
def writeSectorBlock(self,uid, sector, block, data, keyA=None, keyB = None):
absoluteBlock = sector * 4 + (block % 4)
if absoluteBlock > 63 :
return self.ERR
if len(data) != 16:
return self.ERR
if self.authKeys(uid,absoluteBlock,keyA,keyB) != self.ERR :
return self.write(absoluteBlock, data)
return self.ERR
def readSectorBlock(self,uid ,sector, block, keyA=None, keyB = None):
absoluteBlock = sector * 4 + (block % 4)
if absoluteBlock > 63 :
return self.ERR, None
if self.authKeys(uid,absoluteBlock,keyA,keyB) != self.ERR :
return self.read(absoluteBlock)
return self.ERR, None
def MFRC522_DumpClassic1K(self,uid, Start=0, End=64, keyA=None, keyB=None):
for absoluteBlock in range(Start,End):
status = self.authKeys(uid,absoluteBlock,keyA,keyB)
# Check if authenticated
print("{:02d} S{:02d} B{:1d}: ".format(absoluteBlock, absoluteBlock//4 , absoluteBlock % 4),end="")
if status == self.OK:
status, block = self.read(absoluteBlock)
if status == self.ERR:
break
else:
for value in block:
print("{:02X} ".format(value),end="")
print(" ",end="")
for value in block:
if (value > 0x20) and (value < 0x7f):
print(chr(value),end="")
else:
print('.',end="")
print("")
else:
break
if status == self.ERR:
print("Authentication error")
return self.ERR
return self.OK
sdcard.py -
"""
MicroPython driver for SD cards using SPI bus.
Requires an SPI bus and a CS pin. Provides readblocks and writeblocks
methods so the device can be mounted as a filesystem.
Example usage on pyboard:
import pyb, sdcard, os
sd = sdcard.SDCard(pyb.SPI(1), pyb.Pin.board.X5)
pyb.mount(sd, '/sd2')
os.listdir('/')
Example usage on ESP8266:
import machine, sdcard, os
sd = sdcard.SDCard(machine.SPI(1), machine.Pin(15))
os.mount(sd, '/sd')
os.listdir('/')
"""
from micropython import const
import time
_CMD_TIMEOUT = const(100)
_R1_IDLE_STATE = const(1 << 0)
# R1_ERASE_RESET = const(1 << 1)
_R1_ILLEGAL_COMMAND = const(1 << 2)
# R1_COM_CRC_ERROR = const(1 << 3)
# R1_ERASE_SEQUENCE_ERROR = const(1 << 4)
# R1_ADDRESS_ERROR = const(1 << 5)
# R1_PARAMETER_ERROR = const(1 << 6)
_TOKEN_CMD25 = const(0xFC)
_TOKEN_STOP_TRAN = const(0xFD)
_TOKEN_DATA = const(0xFE)
class SDCard:
def __init__(self, spi, cs):
self.spi = spi
self.cs = cs
self.cmdbuf = bytearray(6)
self.dummybuf = bytearray(512)
self.tokenbuf = bytearray(1)
for i in range(512):
self.dummybuf[i] = 0xFF
self.dummybuf_memoryview = memoryview(self.dummybuf)
# initialise the card
self.init_card()
def init_spi(self, baudrate):
try:
master = self.spi.MASTER
except AttributeError:
# on ESP8266
self.spi.init(baudrate=baudrate, phase=0, polarity=0)
else:
# on pyboard
self.spi.init(master, baudrate=baudrate, phase=0, polarity=0)
def init_card(self):
# init CS pin
self.cs.init(self.cs.OUT, value=1)
# init SPI bus; use low data rate for initialisation
self.init_spi(100000)
# clock card at least 100 cycles with cs high
for i in range(16):
self.spi.write(b"\xff")
# CMD0: init card; should return _R1_IDLE_STATE (allow 5 attempts)
for _ in range(5):
if self.cmd(0, 0, 0x95) == _R1_IDLE_STATE:
break
else:
raise OSError("no SD card")
# CMD8: determine card version
r = self.cmd(8, 0x01AA, 0x87, 4)
if r == _R1_IDLE_STATE:
self.init_card_v2()
elif r == (_R1_IDLE_STATE | _R1_ILLEGAL_COMMAND):
self.init_card_v1()
else:
raise OSError("couldn't determine SD card version")
# get the number of sectors
# CMD9: response R2 (R1 byte + 16-byte block read)
if self.cmd(9, 0, 0, 0, False) != 0:
raise OSError("no response from SD card")
csd = bytearray(16)
self.readinto(csd)
if csd[0] & 0xC0 == 0x40: # CSD version 2.0
self.sectors = ((csd[8] << 8 | csd[9]) + 1) * 1024
elif csd[0] & 0xC0 == 0x00: # CSD version 1.0 (old, <=2GB)
c_size = csd[6] & 0b11 | csd[7] << 2 | (csd[8] & 0b11000000) << 4
c_size_mult = ((csd[9] & 0b11) << 1) | csd[10] >> 7
self.sectors = (c_size + 1) * (2 ** (c_size_mult + 2))
else:
raise OSError("SD card CSD format not supported")
# print('sectors', self.sectors)
# CMD16: set block length to 512 bytes
if self.cmd(16, 512, 0) != 0:
raise OSError("can't set 512 block size")
# set to high data rate now that it's initialised
self.init_spi(1320000)
def init_card_v1(self):
for i in range(_CMD_TIMEOUT):
self.cmd(55, 0, 0)
if self.cmd(41, 0, 0) == 0:
self.cdv = 512
# print("[SDCard] v1 card")
return
raise OSError("timeout waiting for v1 card")
def init_card_v2(self):
for i in range(_CMD_TIMEOUT):
time.sleep_ms(50)
self.cmd(58, 0, 0, 4)
self.cmd(55, 0, 0)
if self.cmd(41, 0x40000000, 0) == 0:
self.cmd(58, 0, 0, 4)
self.cdv = 1
# print("[SDCard] v2 card")
return
raise OSError("timeout waiting for v2 card")
def cmd(self, cmd, arg, crc, final=0, release=True, skip1=False):
self.cs(0)
# create and send the command
buf = self.cmdbuf
buf[0] = 0x40 | cmd
buf[1] = arg >> 24
buf[2] = arg >> 16
buf[3] = arg >> 8
buf[4] = arg
buf[5] = crc
self.spi.write(buf)
if skip1:
self.spi.readinto(self.tokenbuf, 0xFF)
# wait for the response (response[7] == 0)
for i in range(_CMD_TIMEOUT):
self.spi.readinto(self.tokenbuf, 0xFF)
response = self.tokenbuf[0]
if not (response & 0x80):
# this could be a big-endian integer that we are getting here
for j in range(final):
self.spi.write(b"\xff")
if release:
self.cs(1)
self.spi.write(b"\xff")
return response
# timeout
self.cs(1)
self.spi.write(b"\xff")
return -1
def readinto(self, buf):
self.cs(0)
# read until start byte (0xff)
for i in range(_CMD_TIMEOUT):
self.spi.readinto(self.tokenbuf, 0xFF)
if self.tokenbuf[0] == _TOKEN_DATA:
break
time.sleep_ms(1)
else:
self.cs(1)
raise OSError("timeout waiting for response")
# read data
mv = self.dummybuf_memoryview
if len(buf) != len(mv):
mv = mv[: len(buf)]
self.spi.write_readinto(mv, buf)
# read checksum
self.spi.write(b"\xff")
self.spi.write(b"\xff")
self.cs(1)
self.spi.write(b"\xff")
def write(self, token, buf):
self.cs(0)
# send: start of block, data, checksum
self.spi.read(1, token)
self.spi.write(buf)
self.spi.write(b"\xff")
self.spi.write(b"\xff")
# check the response
if (self.spi.read(1, 0xFF)[0] & 0x1F) != 0x05:
self.cs(1)
self.spi.write(b"\xff")
return
# wait for write to finish
while self.spi.read(1, 0xFF)[0] == 0:
pass
self.cs(1)
self.spi.write(b"\xff")
def write_token(self, token):
self.cs(0)
self.spi.read(1, token)
self.spi.write(b"\xff")
# wait for write to finish
while self.spi.read(1, 0xFF)[0] == 0x00:
pass
self.cs(1)
self.spi.write(b"\xff")
def readblocks(self, block_num, buf):
nblocks = len(buf) // 512
assert nblocks and not len(buf) % 512, "Buffer length is invalid"
if nblocks == 1:
# CMD17: set read address for single block
if self.cmd(17, block_num * self.cdv, 0, release=False) != 0:
# release the card
self.cs(1)
raise OSError(5) # EIO
# receive the data and release card
self.readinto(buf)
else:
# CMD18: set read address for multiple blocks
if self.cmd(18, block_num * self.cdv, 0, release=False) != 0:
# release the card
self.cs(1)
raise OSError(5) # EIO
offset = 0
mv = memoryview(buf)
while nblocks:
# receive the data and release card
self.readinto(mv[offset : offset + 512])
offset += 512
nblocks -= 1
if self.cmd(12, 0, 0xFF, skip1=True):
raise OSError(5) # EIO
def writeblocks(self, block_num, buf):
nblocks, err = divmod(len(buf), 512)
assert nblocks and not err, "Buffer length is invalid"
if nblocks == 1:
# CMD24: set write address for single block
if self.cmd(24, block_num * self.cdv, 0) != 0:
raise OSError(5) # EIO
# send the data
self.write(_TOKEN_DATA, buf)
else:
# CMD25: set write address for first block
if self.cmd(25, block_num * self.cdv, 0) != 0:
raise OSError(5) # EIO
# send the data
offset = 0
mv = memoryview(buf)
while nblocks:
self.write(_TOKEN_CMD25, mv[offset : offset + 512])
offset += 512
nblocks -= 1
self.write_token(_TOKEN_STOP_TRAN)
def ioctl(self, op, arg):
if op == 4: # get number of blocks
return self.sectors
lcd_api.py -
import time
class LcdApi:
# Implements the API for talking with HD44780 compatible character LCDs.
# This class only knows what commands to send to the LCD, and not how to get
# them to the LCD.
#
# It is expected that a derived class will implement the hal_xxx functions.
#
# The following constant names were lifted from the avrlib lcd.h header file,
# with bit numbers changed to bit masks.
# HD44780 LCD controller command set
LCD_CLR = 0x01 # DB0: clear display
LCD_HOME = 0x02 # DB1: return to home position
LCD_ENTRY_MODE = 0x04 # DB2: set entry mode
LCD_ENTRY_INC = 0x02 # DB1: increment
LCD_ENTRY_SHIFT = 0x01 # DB0: shift
LCD_ON_CTRL = 0x08 # DB3: turn lcd/cursor on
LCD_ON_DISPLAY = 0x04 # DB2: turn display on
LCD_ON_CURSOR = 0x02 # DB1: turn cursor on
LCD_ON_BLINK = 0x01 # DB0: blinking cursor
LCD_MOVE = 0x10 # DB4: move cursor/display
LCD_MOVE_DISP = 0x08 # DB3: move display (0-> move cursor)
LCD_MOVE_RIGHT = 0x04 # DB2: move right (0-> left)
LCD_FUNCTION = 0x20 # DB5: function set
LCD_FUNCTION_8BIT = 0x10 # DB4: set 8BIT mode (0->4BIT mode)
LCD_FUNCTION_2LINES = 0x08 # DB3: two lines (0->one line)
LCD_FUNCTION_10DOTS = 0x04 # DB2: 5x10 font (0->5x7 font)
LCD_FUNCTION_RESET = 0x30 # See "Initializing by Instruction" section
LCD_CGRAM = 0x40 # DB6: set CG RAM address
LCD_DDRAM = 0x80 # DB7: set DD RAM address
LCD_RS_CMD = 0
LCD_RS_DATA = 1
LCD_RW_WRITE = 0
LCD_RW_READ = 1
def __init__(self, num_lines, num_columns):
self.num_lines = num_lines
if self.num_lines > 4:
self.num_lines = 4
self.num_columns = num_columns
if self.num_columns > 40:
self.num_columns = 40
self.cursor_x = 0
self.cursor_y = 0
self.implied_newline = False
self.backlight = True
self.display_off()
self.backlight_on()
self.clear()
self.hal_write_command(self.LCD_ENTRY_MODE | self.LCD_ENTRY_INC)
self.hide_cursor()
self.display_on()
def clear(self):
# Clears the LCD display and moves the cursor to the top left corner
self.hal_write_command(self.LCD_CLR)
self.hal_write_command(self.LCD_HOME)
self.cursor_x = 0
self.cursor_y = 0
def show_cursor(self):
# Causes the cursor to be made visible
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR)
def hide_cursor(self):
# Causes the cursor to be hidden
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY)
def blink_cursor_on(self):
# Turns on the cursor, and makes it blink
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR | self.LCD_ON_BLINK)
def blink_cursor_off(self):
# Turns on the cursor, and makes it no blink (i.e. be solid)
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY |
self.LCD_ON_CURSOR)
def display_on(self):
# Turns on (i.e. unblanks) the LCD
self.hal_write_command(self.LCD_ON_CTRL | self.LCD_ON_DISPLAY)
def display_off(self):
# Turns off (i.e. blanks) the LCD
self.hal_write_command(self.LCD_ON_CTRL)
def backlight_on(self):
# Turns the backlight on.
# This isn't really an LCD command, but some modules have backlight
# controls, so this allows the hal to pass through the command.
self.backlight = True
self.hal_backlight_on()
def backlight_off(self):
# Turns the backlight off.
# This isn't really an LCD command, but some modules have backlight
# controls, so this allows the hal to pass through the command.
self.backlight = False
self.hal_backlight_off()
def move_to(self, cursor_x, cursor_y):
# Moves the cursor position to the indicated position. The cursor
# position is zero based (i.e. cursor_x == 0 indicates first column).
self.cursor_x = cursor_x
self.cursor_y = cursor_y
addr = cursor_x & 0x3f
if cursor_y & 1:
addr += 0x40 # Lines 1 & 3 add 0x40
if cursor_y & 2: # Lines 2 & 3 add number of columns
addr += self.num_columns
self.hal_write_command(self.LCD_DDRAM | addr)
def putchar(self, char):
# Writes the indicated character to the LCD at the current cursor
# position, and advances the cursor by one position.
if char == '\n':
if self.implied_newline:
# self.implied_newline means we advanced due to a wraparound,
# so if we get a newline right after that we ignore it.
pass
else:
self.cursor_x = self.num_columns
else:
self.hal_write_data(ord(char))
self.cursor_x += 1
if self.cursor_x >= self.num_columns:
self.cursor_x = 0
self.cursor_y += 1
self.implied_newline = (char != '\n')
if self.cursor_y >= self.num_lines:
self.cursor_y = 0
self.move_to(self.cursor_x, self.cursor_y)
def putstr(self, string):
# Write the indicated string to the LCD at the current cursor
# position and advances the cursor position appropriately.
for char in string:
self.putchar(char)
def custom_char(self, location, charmap):
# Write a character to one of the 8 CGRAM locations, available
# as chr(0) through chr(7).
location &= 0x7
self.hal_write_command(self.LCD_CGRAM | (location << 3))
self.hal_sleep_us(40)
for i in range(8):
self.hal_write_data(charmap[i])
self.hal_sleep_us(40)
self.move_to(self.cursor_x, self.cursor_y)
def hal_backlight_on(self):
# Allows the hal layer to turn the backlight on.
# If desired, a derived HAL class will implement this function.
pass
def hal_backlight_off(self):
# Allows the hal layer to turn the backlight off.
# If desired, a derived HAL class will implement this function.
pass
def hal_write_command(self, cmd):
# Write a command to the LCD.
# It is expected that a derived HAL class will implement this function.
raise NotImplementedError
def hal_write_data(self, data):
# Write data to the LCD.
# It is expected that a derived HAL class will implement this function.
raise NotImplementedError
def hal_sleep_us(self, usecs):
# Sleep for some time (given in microseconds)
time.sleep_us(usecs)
pico_i2c_lcd.py -
import utime
import gc
from lcd_api import LcdApi
from machine import I2C
# PCF8574 pin definitions
MASK_RS = 0x01 # P0
MASK_RW = 0x02 # P1
MASK_E = 0x04 # P2
SHIFT_BACKLIGHT = 3 # P3
SHIFT_DATA = 4 # P4-P7
class I2cLcd(LcdApi):
#Implements a HD44780 character LCD connected via PCF8574 on I2C
def __init__(self, i2c, i2c_addr, num_lines, num_columns):
self.i2c = i2c
self.i2c_addr = i2c_addr
self.i2c.writeto(self.i2c_addr, bytes([0]))
utime.sleep_ms(20) # Allow LCD time to powerup
# Send reset 3 times
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(5) # Need to delay at least 4.1 msec
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(1)
self.hal_write_init_nibble(self.LCD_FUNCTION_RESET)
utime.sleep_ms(1)
# Put LCD into 4-bit mode
self.hal_write_init_nibble(self.LCD_FUNCTION)
utime.sleep_ms(1)
LcdApi.__init__(self, num_lines, num_columns)
cmd = self.LCD_FUNCTION
if num_lines > 1:
cmd |= self.LCD_FUNCTION_2LINES
self.hal_write_command(cmd)
gc.collect()
def hal_write_init_nibble(self, nibble):
# Writes an initialization nibble to the LCD.
# This particular function is only used during initialization.
byte = ((nibble >> 4) & 0x0f) << SHIFT_DATA
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
gc.collect()
def hal_backlight_on(self):
# Allows the hal layer to turn the backlight on
self.i2c.writeto(self.i2c_addr, bytes([1 << SHIFT_BACKLIGHT]))
gc.collect()
def hal_backlight_off(self):
#Allows the hal layer to turn the backlight off
self.i2c.writeto(self.i2c_addr, bytes([0]))
gc.collect()
def hal_write_command(self, cmd):
# Write a command to the LCD. Data is latched on the falling edge of E.
byte = ((self.backlight << SHIFT_BACKLIGHT) |
(((cmd >> 4) & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
byte = ((self.backlight << SHIFT_BACKLIGHT) |
((cmd & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
if cmd <= 3:
# The home and clear commands require a worst case delay of 4.1 msec
utime.sleep_ms(5)
gc.collect()
def hal_write_data(self, data):
# Write data to the LCD. Data is latched on the falling edge of E.
byte = (MASK_RS |
(self.backlight << SHIFT_BACKLIGHT) |
(((data >> 4) & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
byte = (MASK_RS |
(self.backlight << SHIFT_BACKLIGHT) |
((data & 0x0f) << SHIFT_DATA))
self.i2c.writeto(self.i2c_addr, bytes([byte | MASK_E]))
self.i2c.writeto(self.i2c_addr, bytes([byte]))
gc.collect()
Working of Project -
The working of this project is pretty simple, when the power is switched on, the Pi Pico firstly initializes the RFID module and then LCD, SD Card modules and connects to them. After connecting, it looks for any RFID Card is being tapped on the RFID sensor or not.
If yes, then it gets the Card's ID and looks it upon the file present on the SD Card and if it find a match, then it'll unlock the door for few moments before the solenoid is de-energized. During this time, the user can push the door and pass through. And after the user passes through, the door closes behind them as it's a latch type lock.
In case where the Card's ID isn't present on the files within the SD Card, then the lock stays closed.
Conclusion -
If up to this point, there's no error which has occurred then you have a working RFID Door Lock. One huge advantage with this kind of system is that, if a user looses their card then we only need to remove that Card's ID from the system, while others stays unaffected.
Unlike in a traditional lock, user will change the lock entirely and re-distribute keys among the affected other's.
About Robu
India's biggest robotics E-commerce company. Robu deals with Arduino, Raspberry Pi, Sensors, Drone parts, 3D printer parts, E-bike accessories and Electronics components etc. Click here to explore range of Robotics products available at Robu. Also, do not forget to follow us on Facebook, Instagram and YouTube because we are constantly contributing to the community by creating content around Arduino, Raspberry Pi, Drones, Sensors etc.
Related Posts

Raspberry Pi Pico - Every Feature You Need in A Budget Friendly Microcontroller
Thursday January 21, 2021 4539 Views
The Raspberry Pi Foundation has launched their first own dual-core ARM Cortex M0+ processor-based smallest-sized and budget-friendly Single Board Computer named as Raspberry Pi Pico.... Read More

Installing Any Required OS on SD card for Raspberryi Pi
Friday March 8, 2019 2623 Views
The tutorial is about installing any official OS for any model of Raspberry Pi on a SD card.... Read More
Step-By-Step Guide: How To Build Your Own IoT Water Level Indicator with Nodemcu ?
Monday May 15, 2023 3023 Views
At places where water tanks are installed there is a need for making the tank filling process automatic as there will be no wastage of water. At some places there... Read More

Raspberry Pi Pico 2 - What's New and exciting about it ?
Thursday August 8, 2024 1285 Views
Hello, today we’ll be looking at this new Raspberry Pi Pico 2 which came out today, 8th August 2024. And it is a substantial improvement over its previous generation which... Read More