Yes, you read it right! A bot that knows how to balance. In this post we’ll learn how to make your own Self Balancing Robot using balancewii.

Yes, you read it right! A bot that knows how to balance. In this post we’ll learn how to make your own Self Balancing Robot using balancewii.
Components required in this project:
- Arduino NANO
- MPU6050 Gyro Sensor
- HC-05 Bluetooth module
- A4988 Stepper Driver
- Nema 17 Stepper motors
- 100mm Wheels
- Acrylic Sheet
- 150mm Threaded Rods
- Orange 1500mAh 3S 40C/80C (11.1V) Li-Po Battery Pack
- 6 x 8 cm Universal PCB Prototype Board Double-Side
- 100uF, 50V capacitor
CIRCUIT DIAGRAM:
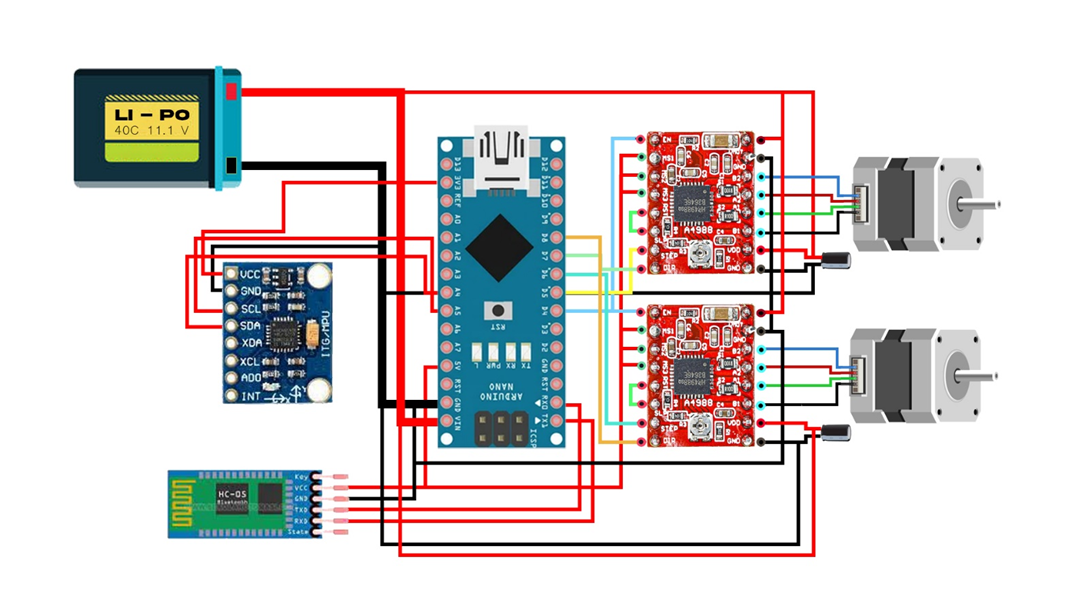
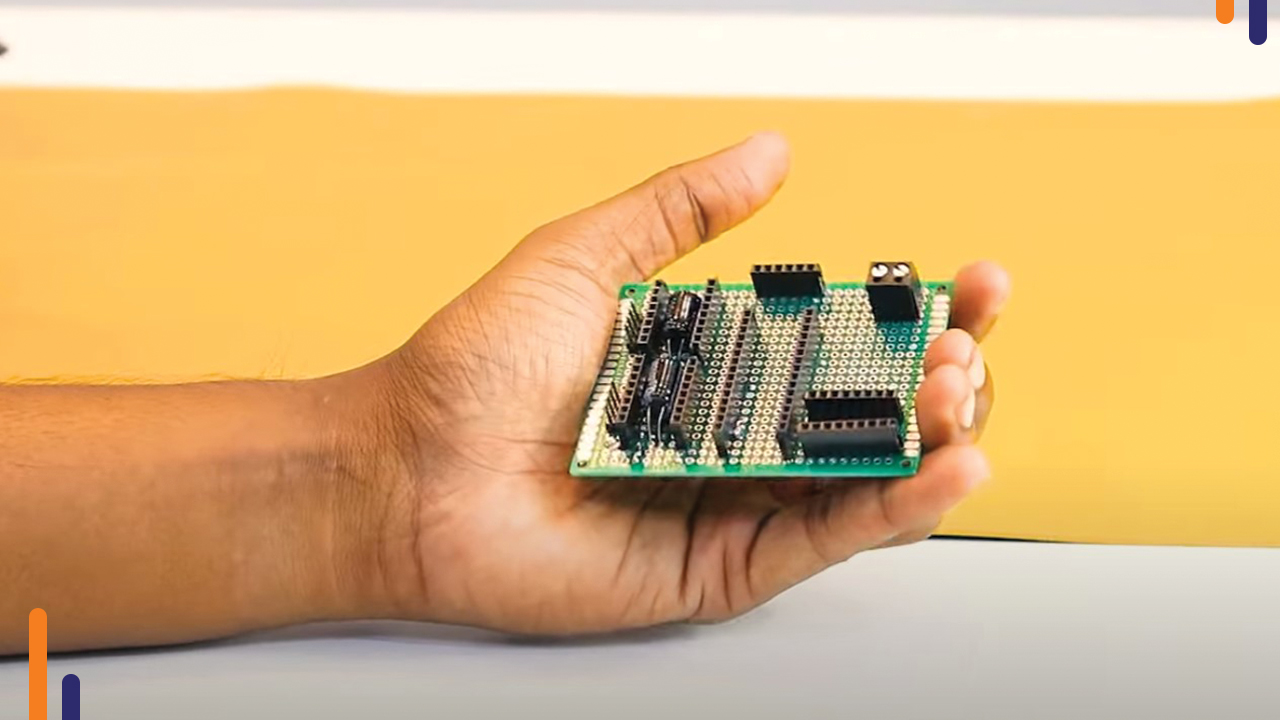
Make the connections as shown in the above circuit diagram. We have used a 6x8 cm universal PCB prototype board to solder out the connections.
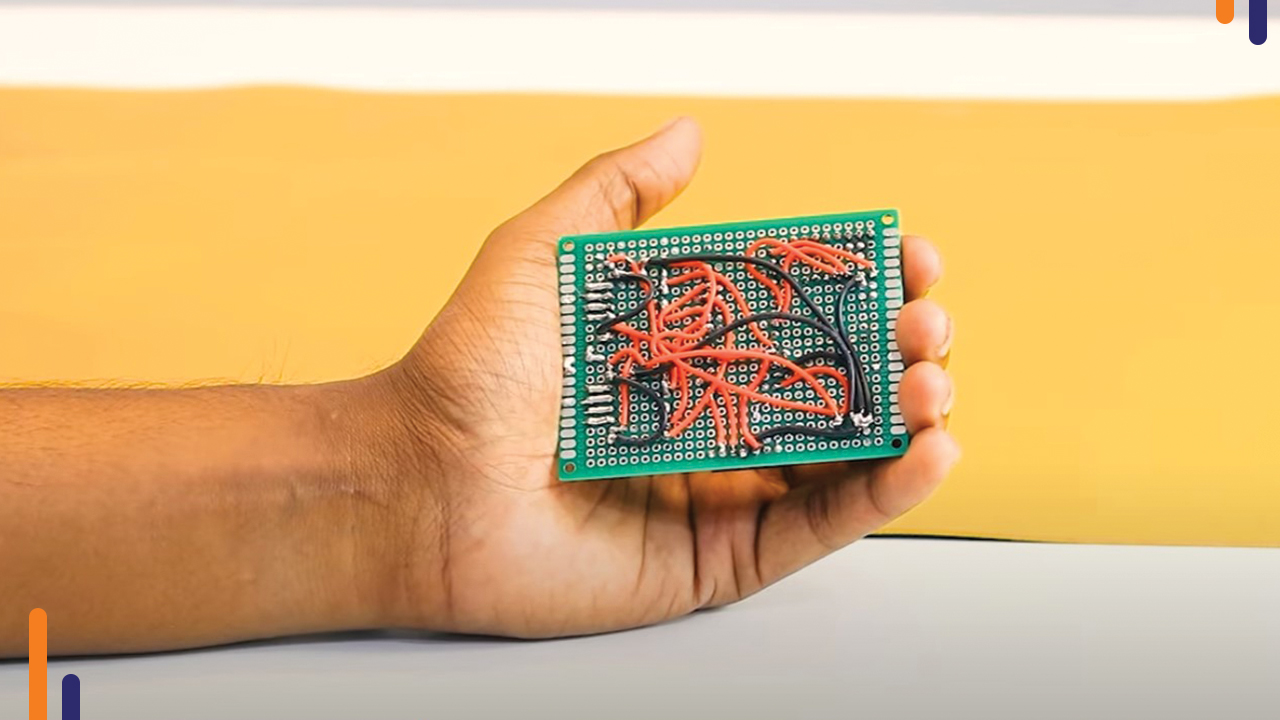
Note: Check for short circuits using DMM before mounting the hardware.
Basic Connections:
| A4 | SDA |
| A5 | SCL |
| D4 | ENABLE (both) |
| D5 | STEP1 |
| D6 | STEP2 |
| D7 | DIR1 |
| D8 | DIR2 |
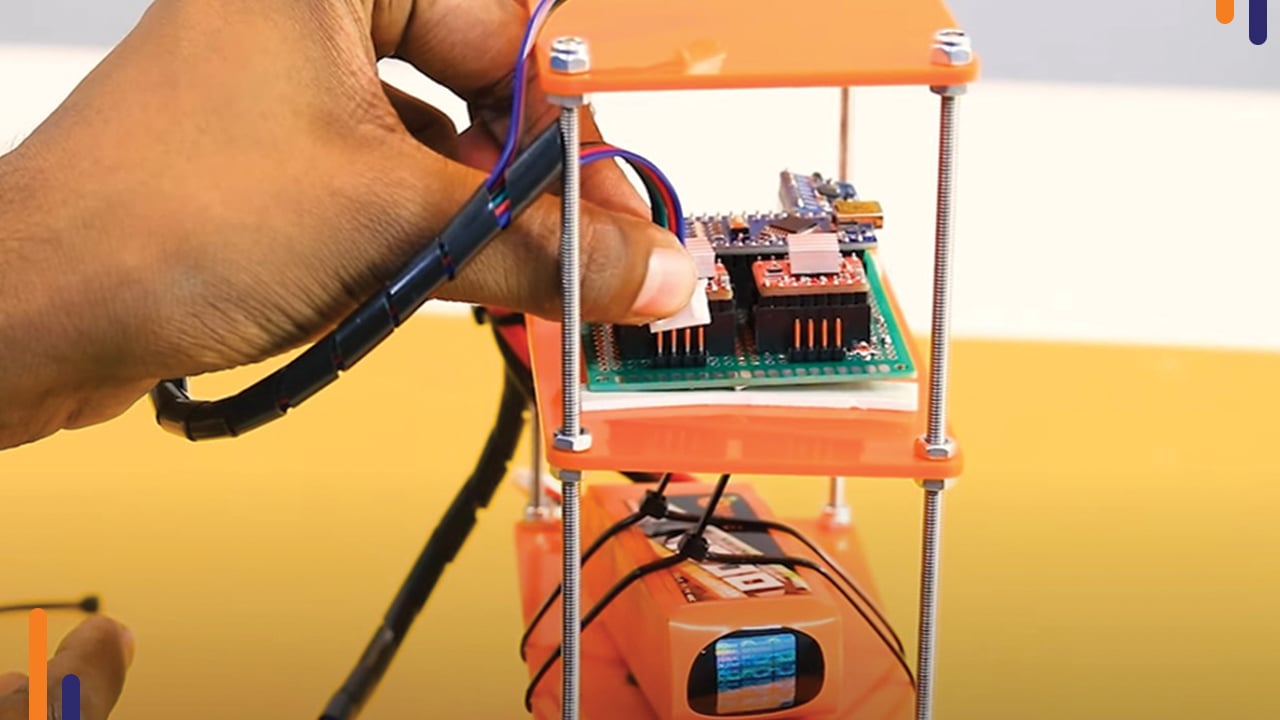
CONSTRUCTION:
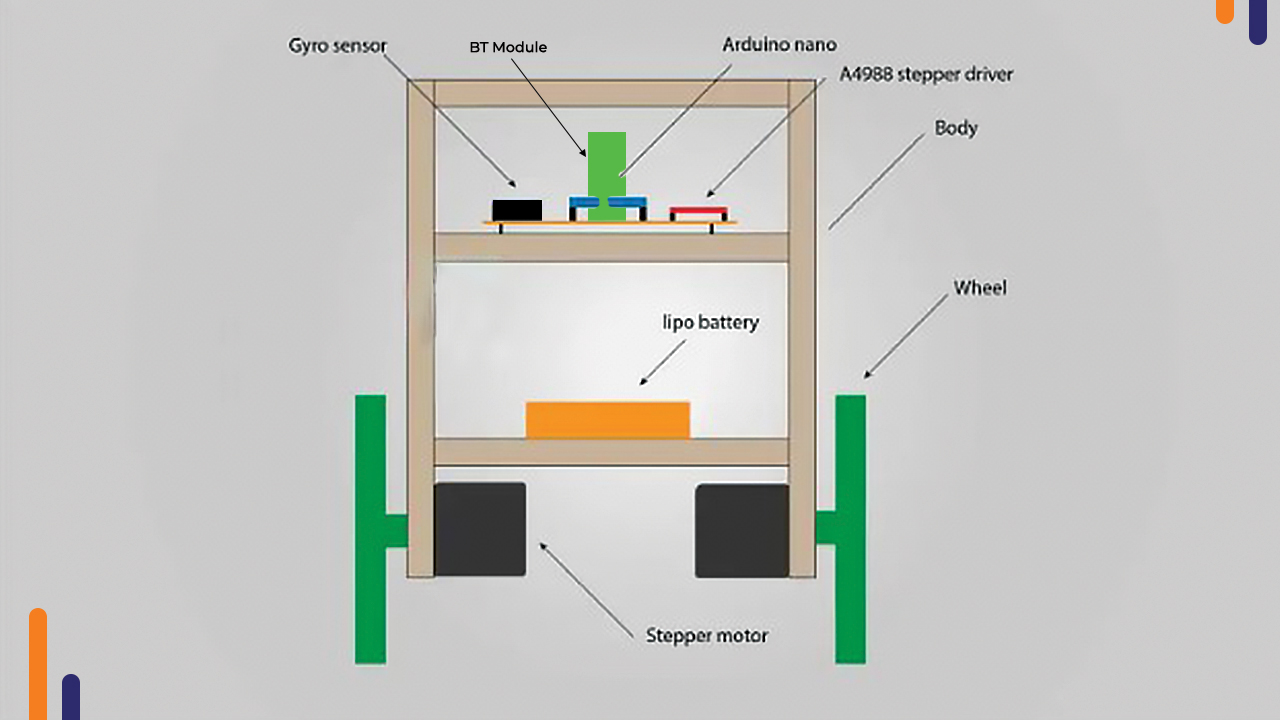
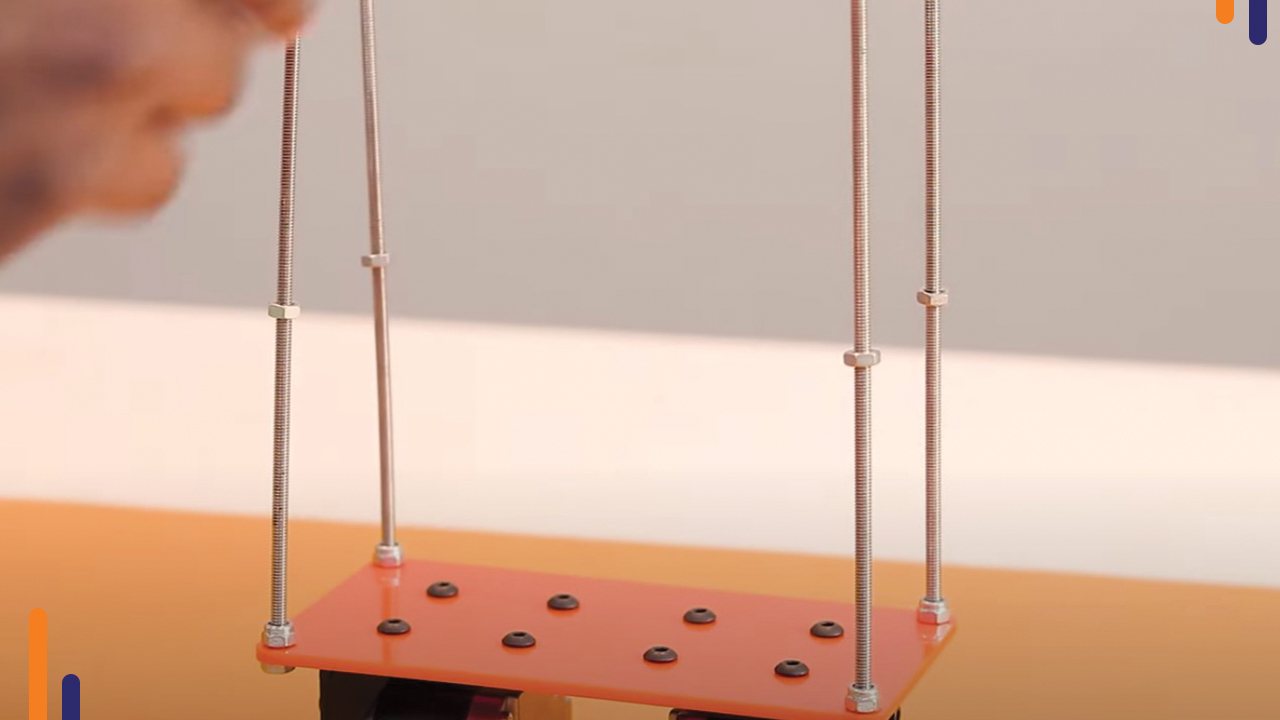
For the framework, you need 4 x 150 mm Threaded rods.

Three 140x75 mm acrylic sheets for lower, middle and upper platforms.

Drill suitable holes to fix stepper motor on the bottom platform.

Screw tight the stepper motors suing angle support.
Add the frame work rods at each corner of the base platform.
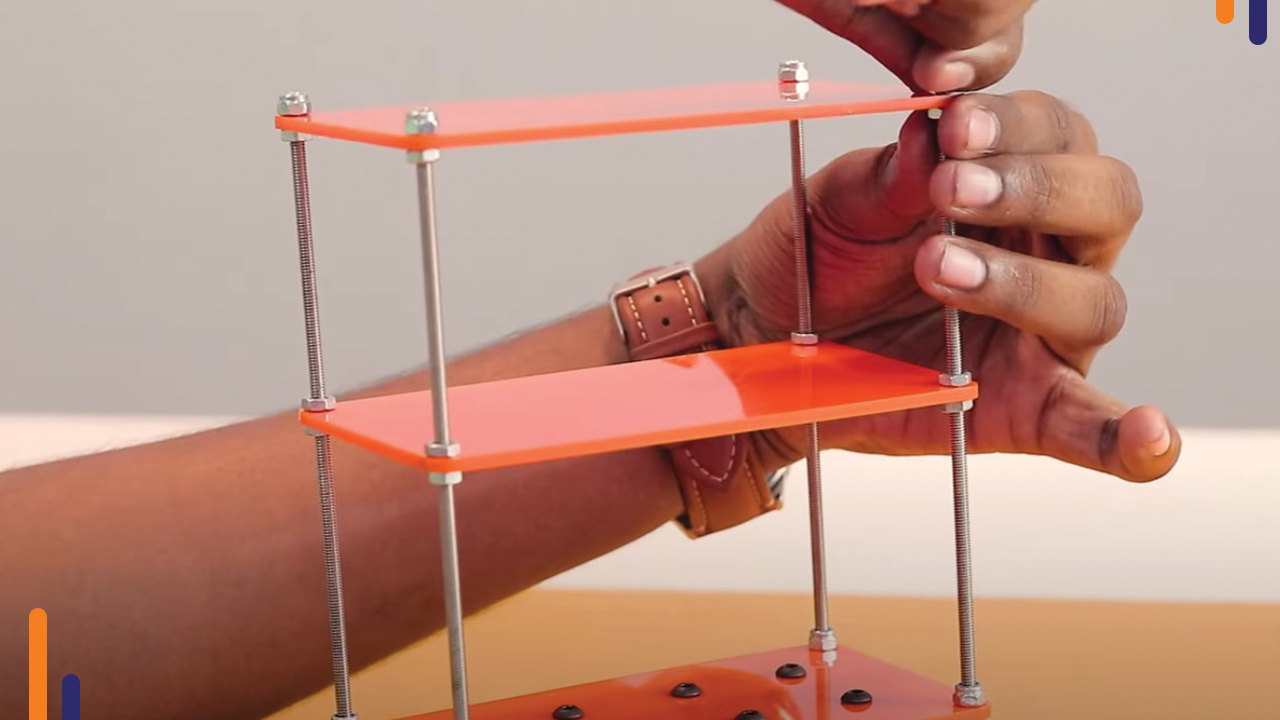
Now it’s time to add the middle platform.

Fix tightly the middle platform and now also add the top platform, fix it using dome nuts.
Place the Li-Po on the base, fix it to place using zip-ties.

Now place the circuit board on the middle platform, the orientation of the board should be similar as shown.
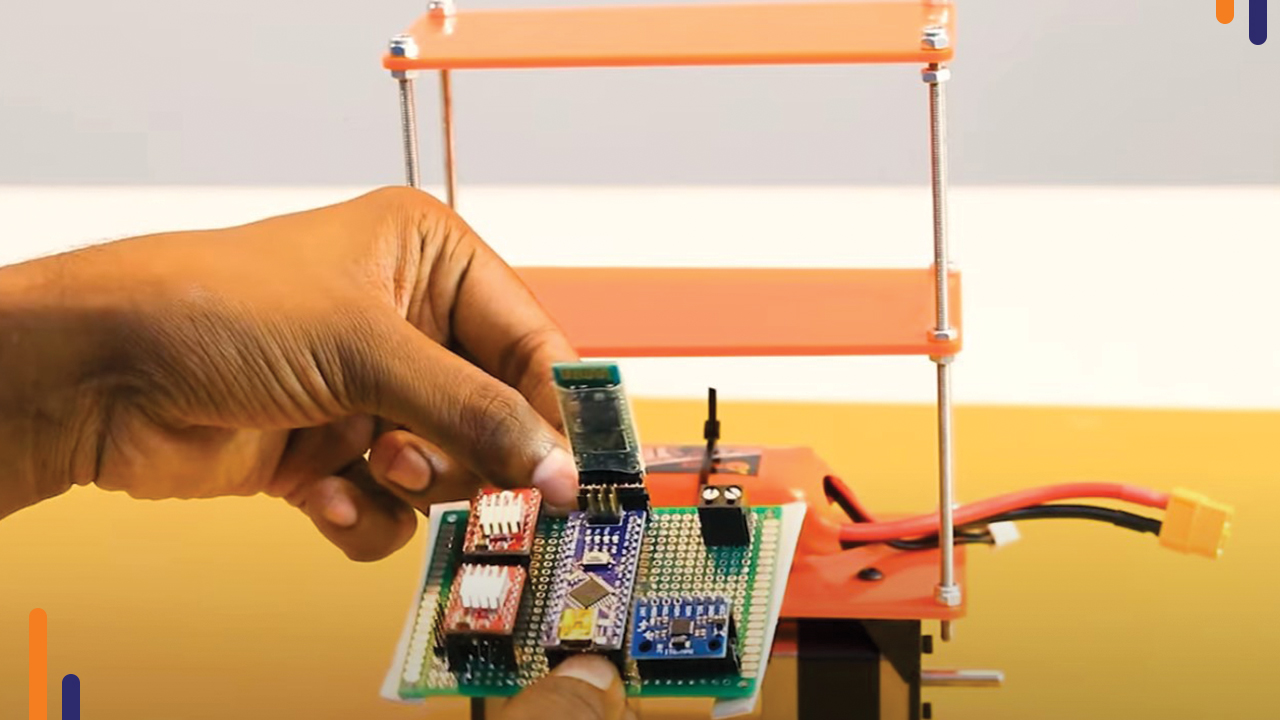
Connect both the stepper motors to A4988 drivers as shown.
Bravo! The structure is ready, Now It’s time to program the Arduino.
PROGRAMMING:
To begin programming the Arduino, we must first download balancingwii firmware for the balancing robot.
This firmware is based on the Multiwii firmware, which is commonly used for quadcopter and multi-rotor flying drones.
Mahowik, who created this firmware, deserves special recognition.
Download the firmware balancingwii by clicking here, then click the green clone or download button.
The firmware will be downloaded in ZIP format to your computer.
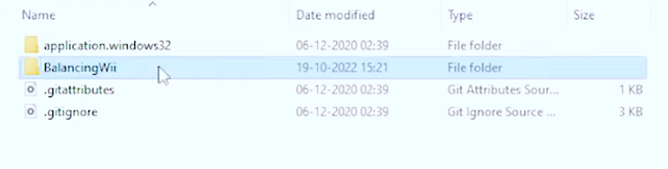
Rename the folder containing balancingwii.ino file to “BalancingWii” to avoid compiling error.
Now open the balancingwii.ino file in arduino and compile and upload the code without making any changes.
NOTE:
If your MPU6050 orientation is similar to us, keep the CURRENT_AXIS to PITCH otherwise change it to ROLL.
BT module should be turned OFF before uploading the code.
APP CONFIGURATION:
We are going to use app called EZ-GUI, It is an Android based Ground Control Station (GCS) for UAVs based on MultiWii and Cleanflight.
- Open the app, click on the three dots at the top right corner of screen.
- Go to settings.
- Click on BT Device to select BT module “HC-05”
- Now select the firmware as “Multiwii 2.40” and click next till you reach at home screen.
- Click on CONNECT and wait for the app to connect to your BT module.
- Swipe left and navigate to settings.
- Click on AUX, select ARM, SIMPLE, POS HOLD for AUX1, AUX2, AUX3 respectively.
- Click upload and send the data to controller.
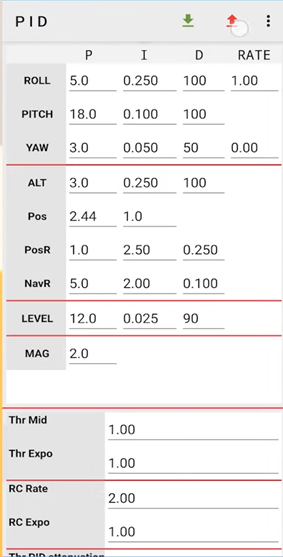
- Go to PID, alter the values to the one given below and click upload.
Now place the bot at a flat elevation for calibration. Wait till the calibration ends.
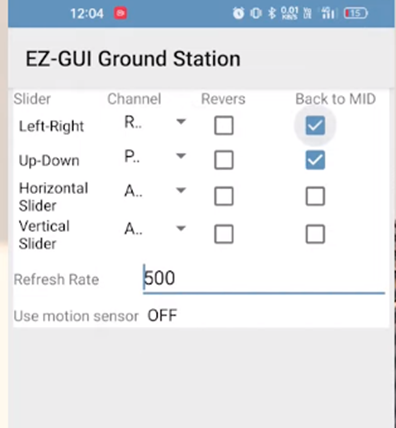
Now back from this screen, and click on three dot at top right corner and go to “advance” and then go to “Untested” and then click on “Model control”
NOTE: If you are not able to control your bot try changing the channel to “ROLL” and “PITCH”.
And it’s ready, Use the joystick to run your self-balancing bot.
Play with the settings to learn more about the bot and its working.
That's it for the blog. Stay safe. Stay tuned at Robu.in
About Robu
India's biggest robotics E-commerce company. Robu deals with Arduino, Raspberry Pi, Sensors, Drone parts, 3D printer parts, E-bike accessories and Electronics components etc. Click here to explore range of Robotics products available at Robu. Also, do not forget to follow us on Facebook, Instagram and YouTube because we are constantly contributing to the community by creating content around Arduino, Raspberry Pi, Drones, Sensors etc.
Related Posts

A Complete Guide Of Drone Propellers and Its Type
Wednesday May 3, 2023 4533 Views
Drone technology has advanced rapidly over the past decade and one of the key components in a drone is the propeller. Propellers are responsible for lifting the drone off the... Read More

What is RF Transmitter and Receiver
Friday May 22, 2020 16131 Views
In this article, we will understand, what is RF transmitter and receiver? Its features and applications.... Read More
Create an eye-catching scrolling text LED display using Arduino UNO
Tuesday June 6, 2023 5300 Views
Scrolling text led displays are a very useful when it comes to displaying text messages. Commonly they are seen at railway stations, at toll plazas, in train and in bus.... Read More

What is Dual Power Supply? - Circuit Construction and Working
Monday April 26, 2021 7296 Views
A Dual power supply is a regular direct current power supply. It can provide a positive as well as negative voltage. It ensures stable power supply to the device as well as it helps to prevent system ... Read More