Interfacing IR Sensor With STM32 Discovery Board
STM32 Boards have 23 interrupt sources. In this article, we will see how STM32 handles interrupts at a primitive level.

Hello, we have already gone through the introduction of the STM32 discovery board. Today we are going to interface the Infrared Sensor with STM Board. If you are a beginner in using STM programming, you will understand the interrupt handling and use of GPIO pins. Let's get started!
Components Required:
Interfacing Diagram:
The following picture depicts the interfacing between the IR module and STM32 DISC Board. PA1 pin introduces interrupt as IR sensor detects an obstacle. The LED connected at PD1 indicates the interrupt status.

Pinout:
- LED1- PD0 (Pin 0 of Port D)
- LED2- PD1 (Pin 1 of Port D)
- IR (5V)- 5V of STM Board
- IR (Gnd)- GND of STM
- IR (Dout)- PA1 (Pin 1 of Port A)
Software:
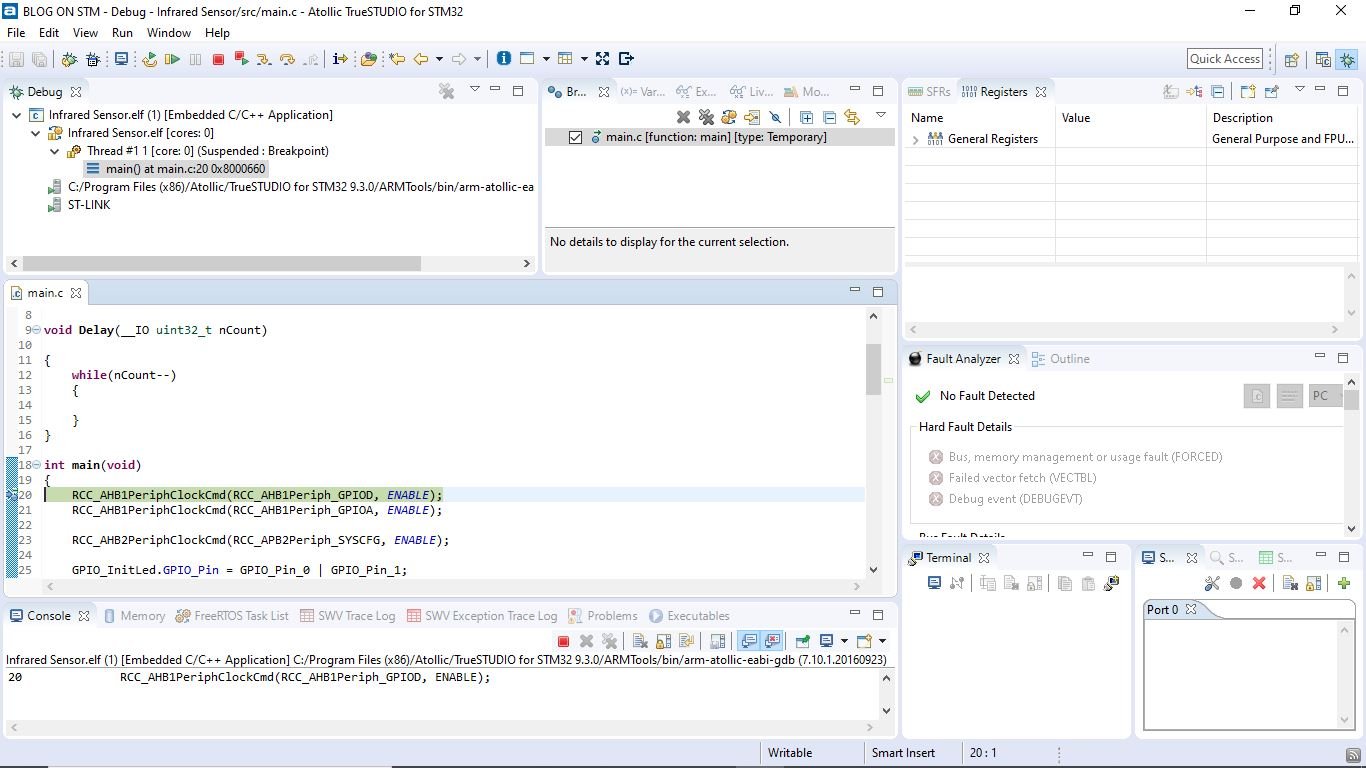
Let's move towards code writing and deployment. I have used Atollic Truestudio for the programming of the board. The initial steps are software installing and selecting the board. After that, go to Files-->New Project-->C project and the perspective of the new project will open, as you can see in the following image.
- Step 1: Create New Project.
- Step 2: Write Code.
- Step 3: Save.
- Step 4: Build Project.
- Step 5: Debug.

In the Debugger perceptive, press the resume button to run the code on STM32 Board.
Code:
STM32F GPIO pins are classified as Port A, Port B, Port C etc. All these ports are inactive by default. However, if we have to use them, we must enable the clock at a particular GPIO.
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); //Enable GPIOD clock
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //Enable GPIOA clock
RCC_AHB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE); // Enable SYSCFG clock
GPIO_InitLed.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; // GPIOs as output push-pull to drive external GPIO_InitLed.GPIO_Mode = GPIO_Mode_OUT; // Define as output port.
GPIO_InitLed.GPIO_Speed = GPIO_Speed_50MHz;The speed at these pins cannot be exact 50MHz. But, by using this line, we are trying to get the maximum possible speed at it.
GPIO_Init(GPIOD, &GPIO_InitLed);// Apply all above configurations.Normally, STM32 boards have a total of 23 interrupt sources which can be classified into two sections. One section is for GPIO pins from P0 to P15 on each port, and the other is for RTC, Ethernet and USB interrupts. As PA0 and PB0 are connected to Line 0, we can not use them simultaneously. However, PA2 and PA6 can be used at a time as they are connected to different lines.
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource1);//Connect EXTI at Line1 to PA1 pin
/*Configuration of EXTI at Line1.*/
EXTI_InitSensor.EXTI_Line = EXTI_Line1;
EXTI_InitSensor.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitSensor.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitSensor.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitSensor);
NVIC_InitSensor.NVIC_IRQChannel = EXTI1_IRQn;// Selection of interrupt
The below lines sets the priority level of interrupt. i.e., the highest priority interrupt has a lower number from 0x00 to 0x0F.
NVIC_InitSensor.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitSensor.NVIC_IRQChannelSubPriority = 0;
NVIC_InitSensor.NVIC_IRQChannelCmd = ENABLE;// enable interrupt.
void EXTI1_IRQHandler(void) // interrupt Handler for pin1 connected to line 1
{
if(EXTI_GetITStatus(EXTI_Line1) != RESET)
{
GPIO_WriteBit(GPIOD, GPIO_Pin_1, Bit_SET);
Delay(33600000);
GPIO_WriteBit(GPIOD, GPIO_Pin_1, Bit_RESET);
}
} // Interrupt handler
EXTI_ClearITPendingBit(EXTI_Line1);// Clear the EXTI line pending bit.The complete program is as follows.
#include "stm32f4xx.h"
#include "stm32f4_discovery.h"
GPIO_InitTypeDef GPIO_InitLed;
EXTI_InitTypeDef EXTI_InitSensor;
NVIC_InitTypeDef NVIC_InitSensor;
void Delay(__IO uint32_t nCount)
{
while(nCount--)
{
}
}
int main(void)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_AHB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
GPIO_InitLed.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitLed.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitLed.GPIO_OType = GPIO_OType_PP;
GPIO_InitLed.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitLed.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitLed);
GPIO_InitLed.GPIO_Pin = GPIO_Pin_1;
GPIO_InitLed.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitLed.GPIO_Mode = GPIO_OType_PP;
GPIO_InitLed.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_InitLed.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitLed);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource1);
EXTI_InitSensor.EXTI_Line = EXTI_Line1;
EXTI_InitSensor.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitSensor.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitSensor.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitSensor);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitSensor.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitSensor.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitSensor.NVIC_IRQChannelSubPriority = 0;
NVIC_InitSensor.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitSensor);
while (1)
{
GPIO_WriteBit(GPIOD, GPIO_Pin_0, Bit_SET);
Delay(16800000);
GPIO_WriteBit(GPIOD, GPIO_Pin_0, Bit_RESET);
Delay(16800000);
}
}
void EXTI1_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line1) != RESET)
{
GPIO_WriteBit(GPIOD, GPIO_Pin_1, Bit_SET);
Delay(33600000);
GPIO_WriteBit(GPIOD, GPIO_Pin_1, Bit_RESET);
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
Output:
Final Words:
Hope you found this article informative. If you are interested to learn more about it, let us know your thoughts in the comment section.
About Robu
India's biggest robotics E-commerce company. Robu deals with Arduino, Raspberry Pi, Sensors, Drone parts, 3D printer parts, E-bike accessories and Electronics components etc. Click here to explore range of Robotics products available at Robu. Also, do not forget to follow us on Facebook, Instagram and YouTube because we are constantly contributing to the community by creating content around Arduino, Raspberry Pi, Drones, Sensors etc.
Related Posts

Design Considerations for 3D printing - Things To Know in 2021
Tuesday May 11, 2021 2056 Views
In this article, we will understand the major considerations that every 3D designer should follow when designing a 3D object.... Read More

3D Printer Types Explained In Details - SLA, DMLS, FDM, SLS
Saturday April 10, 2021 2295 Views
There are many 3D printing processes that are available in the market and can be used to design 3D objects.... Read More
A Beginner Guide to NodeMCU
Wednesday May 6, 2020 6750 Views
The blog will guide you through the getting started process for the NodeMCU.... Read More

Build your own 3D printed DIY FPV mini robo tank using Seeed Studio XIAO ESP32S3 Sense
Tuesday February 6, 2024 827 Views
Hey everyone welcome back to an interning blog today we are going to build awesome FPV Robo tank using Seeed Studio XIAO ESP32S3 Sense, which can be controlled using local... Read More